Die Aussetz- und Bergevorrichtung
|
Autonome, unbemannte Unterwasserfahrzeuge, so genannte AUVs (englisch: autonomous under water vehicles), erfuhren seit Beginn des neuen Jahrtausends einen regelrechten Boom. Neben der geo- sowie biologischen Forschung und militärischen Zwecken werden diese Fahrzeuge verstärkt in der Tiefsee für die Suche nach neuen Rohstoffquellen eingesetzt, deren Abbau durch die Abnahme landgebundener Vorkommen zunehmend rentabler wird.
Bei einer Erkundungsmission bringt ein Versorgungsschiff die Unterwasserfahrzeuge in das Einsatzgebiet, wo sie in mehreren Tauchgängen beispielsweise den Meeresboden präzise kartographieren. Zwischen den Arbeitsgängen werden die Fahrzeuge zur Wartung an Deck des Versorgungsschiffs geholt und für neue Missionen wieder ausgesetzt.
Bei hohem Wellengang gestalten sich die Einhol- und Aussetzmanöver jedoch oft schwierig, da die Gefahr von Kollisionen mit dem Versorgungsschiff besteht. Die dabei auftretenden Beschädigungen führen zu Ausfallzeiten und Reparaturkosten. Im schlimmsten Fall droht der Verlust des bis zu mehreren Millionen Euro teuren Fahrzeugs. Daher ist eine geeignete Vorrichtung erforderlich, welche auch bei hohem Wellengang ein gefahrloses Ausbringen und Bergen des Fahrzeugs gestattet.

Unterwasserfahrzeug PreToS
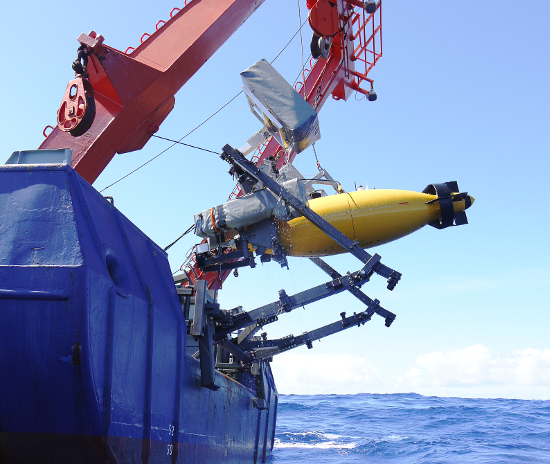
In dem vom Bundesministerium für Wirtschaft und Technologie (BMWi) geförderten Projekt „Druckneutrale Systeme für die Tiefsee“ wurde am Fachgebiet Mikrotechnik der Technischen Universität Berlin in Zusammenarbeit mit drei Projektpartnern das autonome Unterwasserfahrzeug PreToS (englisch: Pressure Tolerant Systems) entwickelt, welches bei einer Länge von vier Metern ein Gewicht von ca. 1.200 Kilogramm aufweist. Der druckneutrale Aufbau der integrierten Baugruppen erlaubt Tauchtiefen bis zu 6.000 Metern.
Um ein sicheres Aussetzen und Bergen des Fahrzeugs auch bei harschen Umgebungsbedingungen zu gewährleisten, wurde für die Testfahrten ein LARS (englisch: Launch And Recovery System) gebaut, das auf allen gängigen Forschungsschiffen eingesetzt werden kann. Das Hauptaugenmerk bei der Entwicklung galt dem Aufbau eines flexiblen und modularen Systems, welches transportabel und mit wenig Personal handhabbar ist. Die PreToS war bei der Entwicklung des LARS weitgehend fertig gestellt, so dass bei der Ausgestaltung des LARS-Systems der Aufbau des AUVs berücksichtigt werden musste.

Aufbau des Bergesystems
-
Der Aufbau des LARS besteht aus drei Hauptkomponenten: den Lagerböcken zur Führung der Schwenkarme sowie dem Bergekäfig, der zur Aufnahme des Fahrzeugs dient. Er verfügt über einen mechanischen Verschluss, mit dem sich das AUV beim Aussetzen und Bergen im Bergekäfig fixieren lässt. Befestigt wird der Bergekäfig an den Schwenkarmen, welche als Führung für den Käfig und das dort fixierte Fahrzeug beim Einholen und Aussetzen dienen, so dass kaum Pendelbewegungen auftreten. Auf dem Schiff sind die Lagerböcke zur Halterung des Gesamtsystems direkt unter dem A-Rahmen auf Deck verschraubt. Dabei dient der A-Rahmen als Schwenkkran, der das LARS beim Ein- und Aussetzen bewegt, so dass keine eigene Hebevorrichtung benötigt wird.
An den Schwenkarmen und dem Bergekäfig befinden sich Schwimmkörper aus Styrodur. Der Schwenkarm und der Bergekäfig schwimmen daher auf dem Wasser, wenn das Kranseil völlig entspannt ist. Aufgrund der Gelenke an den Schwenkarmen bewegt sich der Bergekäfig im Wasser weitgehend entkoppelt vom Versorgungsschiff. Dies ist von großer Bedeutung, da sich das Schiff aufgrund seiner Länge und Masse bei Wellen sehr viel träger verhält. Damit lässt sich das Risiko schwerer Kollisionen erheblich reduzieren.
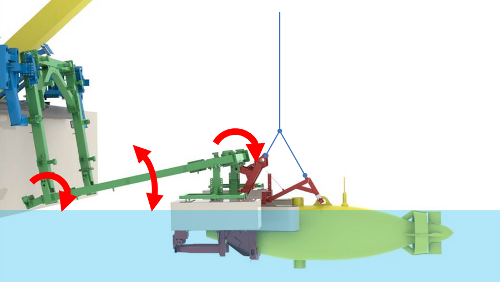
Bergekäfig und AUV schwimmen von der Schiffsbewegung entkoppelt im Wasser
Zu Beginn des Bergemanövers wirft ein an der Spitze des AUVs befindlicher elekromechanischer Abwurfmechanismus, ausgelöst durch einen Stromimpuls der AUV-Bordelektronik, nach dem Auftauchen des Boots ein Seil ab (Länge ca. 15 Meter), das an einem Schwimmkörper auf dem Wasser treibt und sich mit einem Bootshaken aufnehmen sowie mit einer am Bergekäfig installierten Winde verbinden lässt. Der Ablauf eines Bergemanövers ist in den folgenden Abbildungen dargestellt:

Aufnahme des vom AUV abgeworfenen Seils
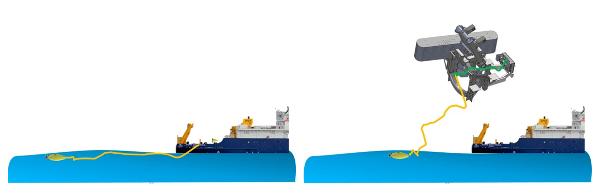
An
Bord des Versorgungsschiffs lässt sich der Schwimmkörper vom
Seil abtrennen.
Das Seil wird mit der Winde des noch an Deck
befindlichen Bergekäfigs verbunden.

Die A-Rahmenwinde des Versorgungsschiffs hievt den an den Schwenkarmen fixierten Bergekäfig in das Wasser. Der Bergekäfig schwimmt frei auf der Wasseroberfläche.

Die motorgetriebene Winde zieht das Fahrzeug in den Bergekäfig.
Ein Verschluss an der Oberseite des
Bergekäfigs sichert das Fahrzeug.

Die A-Rahmenwinde hievt den Käfig inklusive Fahrzeug aus dem Wasser.
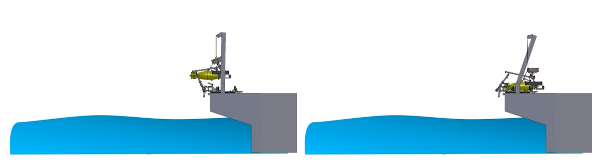
Der A-Rahmen schwenkt auf seine
Sollposition,
und die A-Rahmenwinde senkt das Fahrzeug auf das
Bootsgestell.
Die Erprobung des LARS erfolgte in mehreren Teilschritten. Zunächst wurde in der Schlepprinne der Technischen Universität Berlin und auf unterschiedlichen Forschungsschiffen auf der Ostsee der Bergekäfig optimal auf das Unterwasserfahrzeug abgestimmt. Dabei standen insbesondere die Positionierung sowie das Fixieren des Fahrzeugs im Bergekäfig im Fokus. Danach folgte der Aufbau des Gesamtsystems und dessen Test in der Ostsee. Das völlig neuartige System überzeugte sowohl auf der Ostsee als auch auf dem Atlantik, indem auch bei höheren Wellen das Aussetzen und Bergen der PreToS problemlos gelang.


Tests mit dem LARS in der historischen Schlepprinne der TU Berlin

Aussetzen der PreToS mit dem LARS auf der Ostsee

Einholen der PreToS mit dem LARS aus der Ostsee

Härtetest des LARS auf hoher See:
Die PreToS wird im Atlantik zu Wasser gelassen

Glücklicher Abschluss einer erfolgreichen Forschungsreise:
Bergung unseres AUVs PreToS mit dem LARS aus hohen Wellen
Projektpartner
ENITECH Energietechnik Elektronik GmbH, Bentwisch / Rostock
EvoLogics GmbH, Berlin
Fachgebiet Mikrotechnik der Technischen Universität Berlin
Leibniz-Institut für Ostseeforschung Warnemünde
Alle Ergebnisse sind ausführlich in meiner Dissertation beschrieben:
Aussetz- und Bergevorrichtung für das autonome Unterwasserfahrzeug PreToS
Dank gebührt Herrn Prof. Dr. Heinz Lehr für
die Möglichkeit, an diesem einzigartigen Forschungsprojekt
mitzuarbeiten und mit den gewonnenen Resultaten zu promovieren.
Recht herzlich möchte ich mich für die Zusammenarbeit bei meinen Kollegen, Oliver Preradovic, Eugen Olenew, Romon Chakrabarti, Johannes Gelze und Tino Schmidt bedanken. Weiterhin danke ich Max Fandrich, Andy Große, Ralph Hartmann und Stefan Oginski für die tatkräftige Mitarbeit.
Dem Bundesministerium für Wirtschaft und
Technologie / Projektträger Jülich sei für die
finanzielle Förderung dieses Projekts gedankt.
Förderkatalog: foerderportal.bund.de Förderkennzeichen: 03SX276A
 |
 |
-